
先日入手したISDT製の新しいスピコン「ESC70」
早速動作確認をしてみましたのでリポートします。


配線処理と基本接続
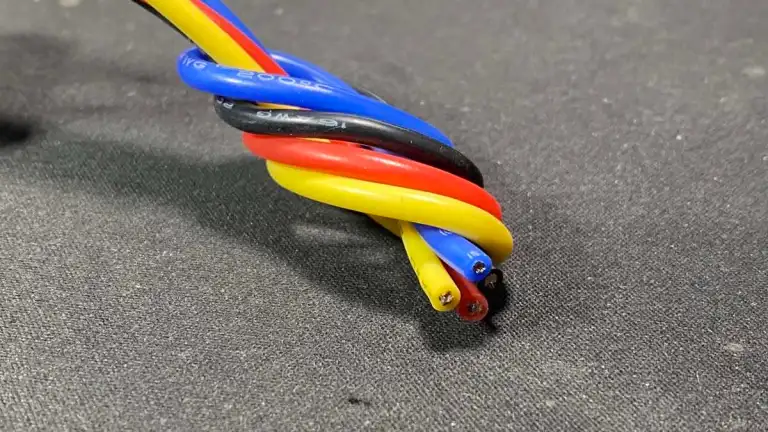
こちらの製品のケーブルには端子は装着されていません。
端子自体付属もしていないので、自分で用意する必要があります。

僕はXT60&バナナプラグ派です。
この程度ならハンダ付けも流石になれました。
端子類はAliexpressで安く入手出来るのでまとめて買っておくと安心です。
 AliExpress.com Product – 10pcs / 5pairs XT60 XT-60 Male Female Bullet Connectors Plugs For RC Lipo Battery
AliExpress.com Product – 10pcs / 5pairs XT60 XT-60 Male Female Bullet Connectors Plugs For RC Lipo Battery
 AliExpress.com Product – 10Pair 4mm RC Battery Gold-plated Bullet Banana Plug High Quality Male Female Bullet Banana Connector
AliExpress.com Product – 10Pair 4mm RC Battery Gold-plated Bullet Banana Plug High Quality Male Female Bullet Banana Connector

端子の取付が終わったので、
- 受信機
- サーボ
- モーター
- ESC70
をそれぞれコネクタに接続しました。
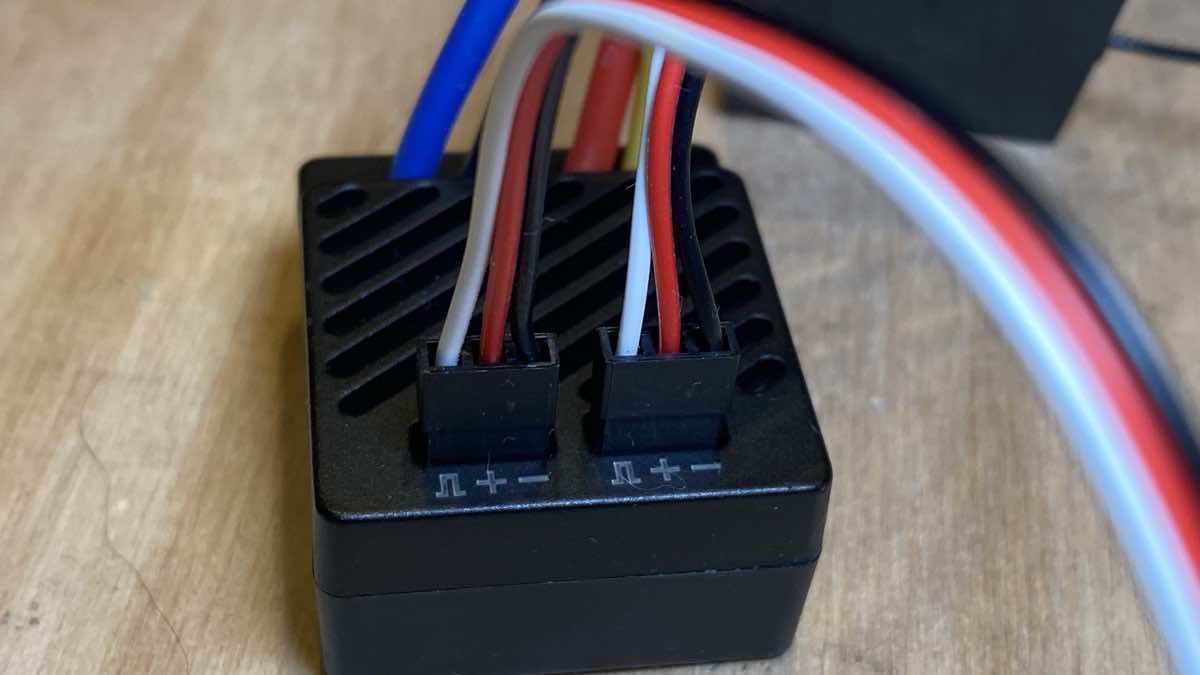
ESC70には2つのサーボコネクタ差し込み口があります。
説明書のイラストでは、右が受信機、左がスイッチに接続されていたのでその通りにしました。

これで問題無く動きました。
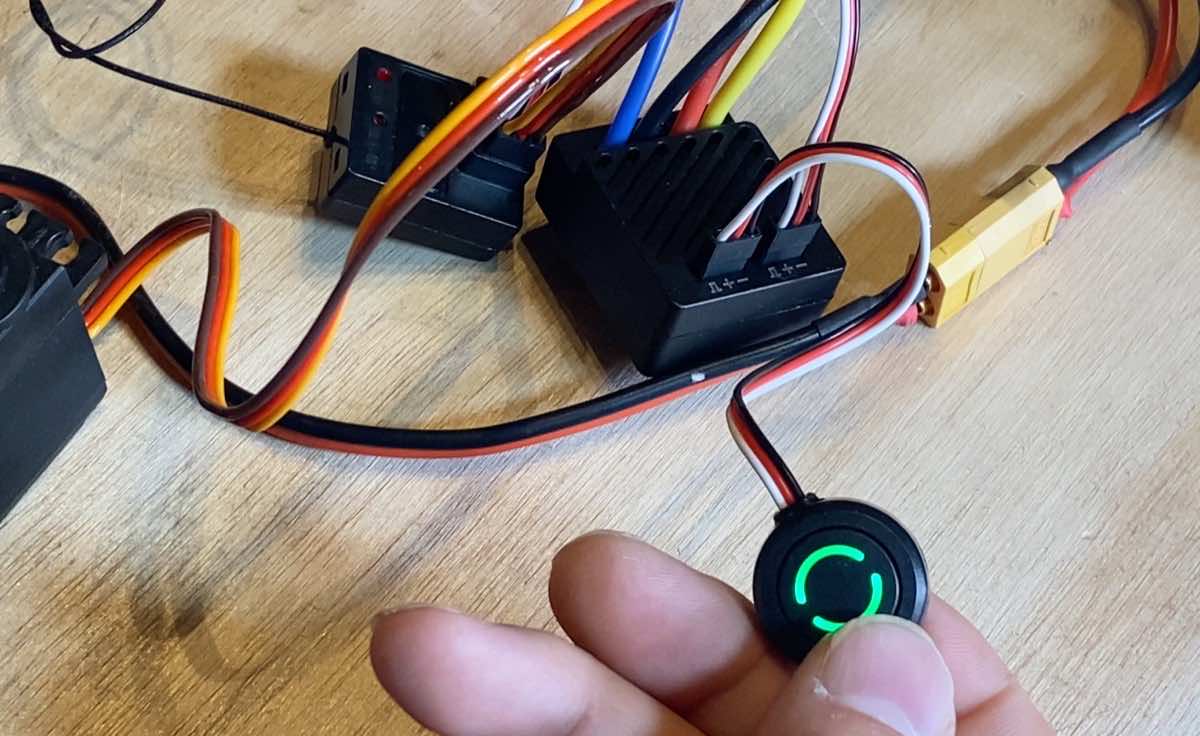
電源入れて、正常動作の場合、スイッチのランプがグリーンになります。
問題がある場合はレッドに光ります。
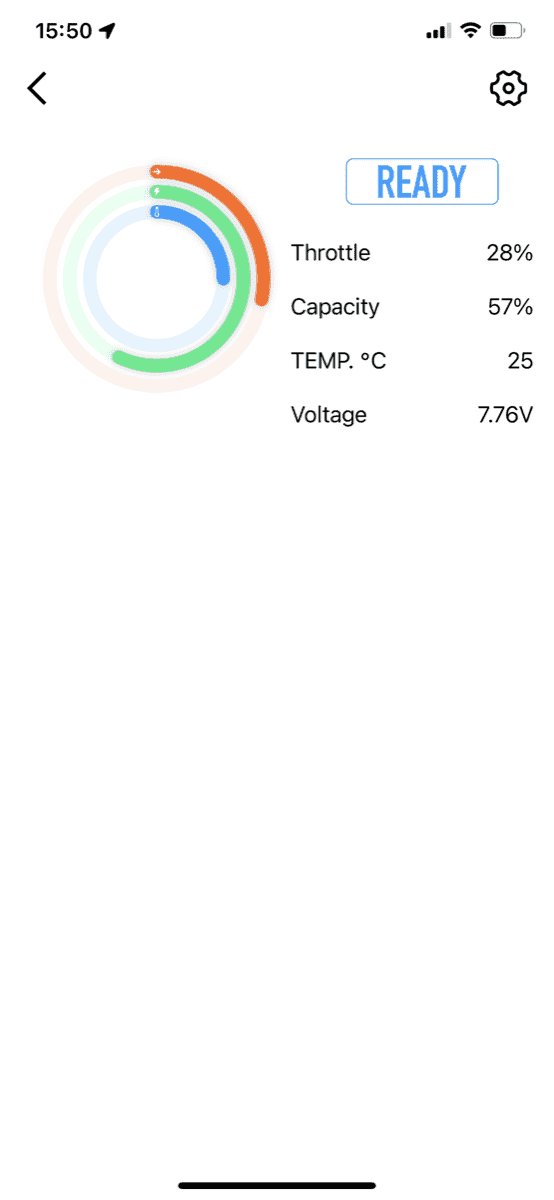
初期設定から全てスマホアプリで行う
ESC70の特徴の1つでもあるスマホでの設定ですが、少々改善点はあるもののとても便利です。
※スマホを使わずにキャリブレーションは行うことも出来る様です。

Bluetoothでペアリングされていると、スイッチがブルーに光ります。
ペアリングモードに入るのは簡単で、スイッチの長押しするだけです。
ISD GO

ペアリングモードにした状態でスマホアプリの”ISD GO” を起ち上げます。
iOSアプリ https://apps.apple.com/us/app/isd-go/id1447072980
Android https://play.google.com/store/apps/details?id=com.isdt.hubin.isdtapp&hl=ja&gl=US
右上の+を押して [scan Bluetooth devices]でESC70をスキャンすると登録されます。
キャリブレーションもアプリで
アプリを見れば直感的に分かると思いますが、始めて起動した時などはまだキャリブレーションが行われていないので「!」赤くビックリマークが表示されます。
そこをタップしてキャリブレーションモードへ
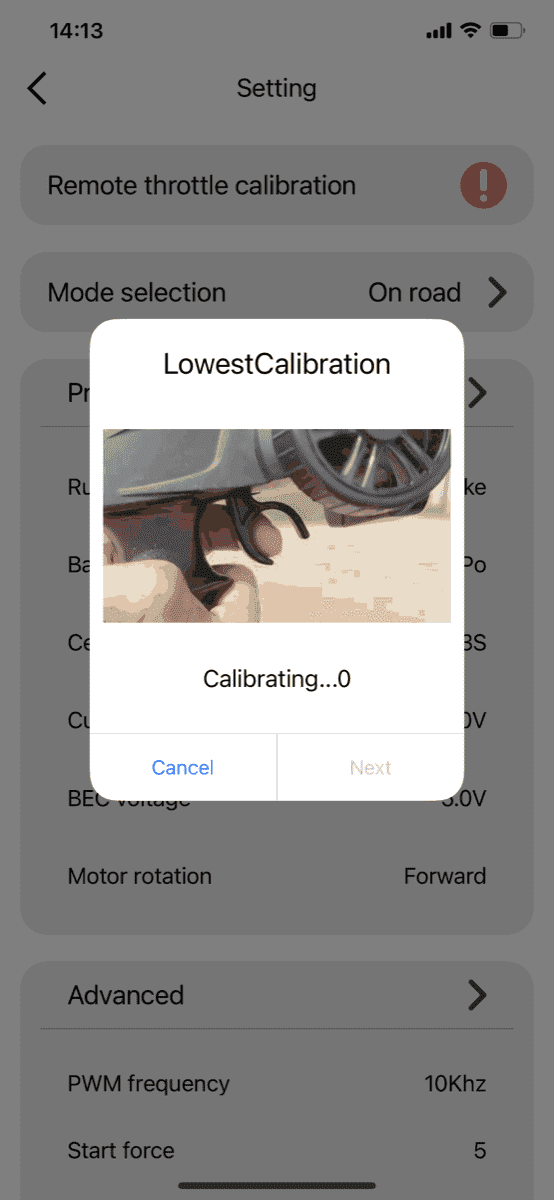
画像付きで手順が出るので簡単です。
他のESC同様、ニュートラル、フルスロットル、フルブレーキ、の3点を計測するだけですけどね。
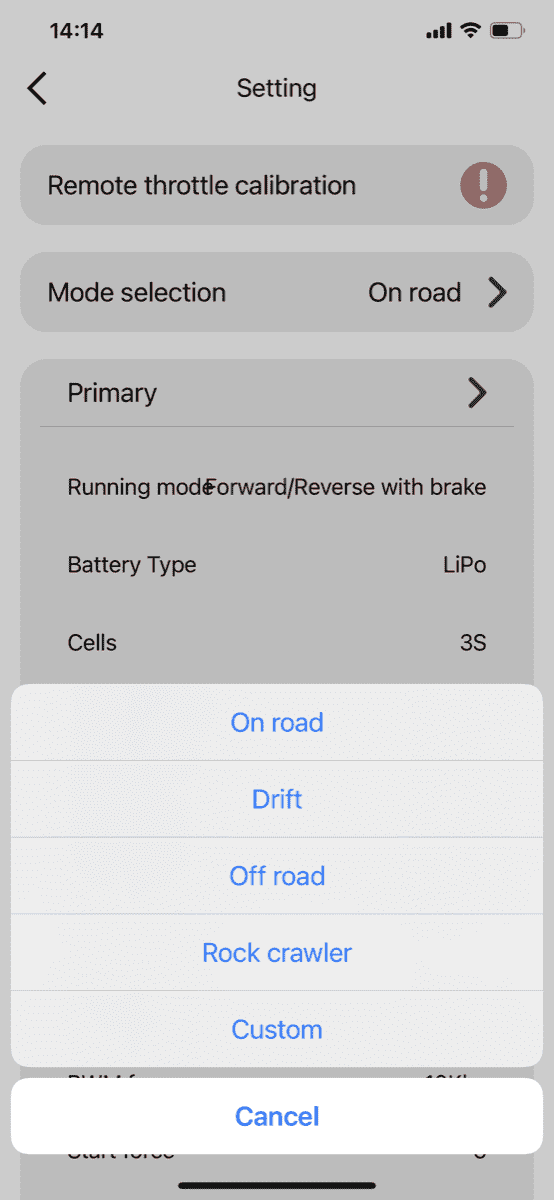
その他色々な設定モード
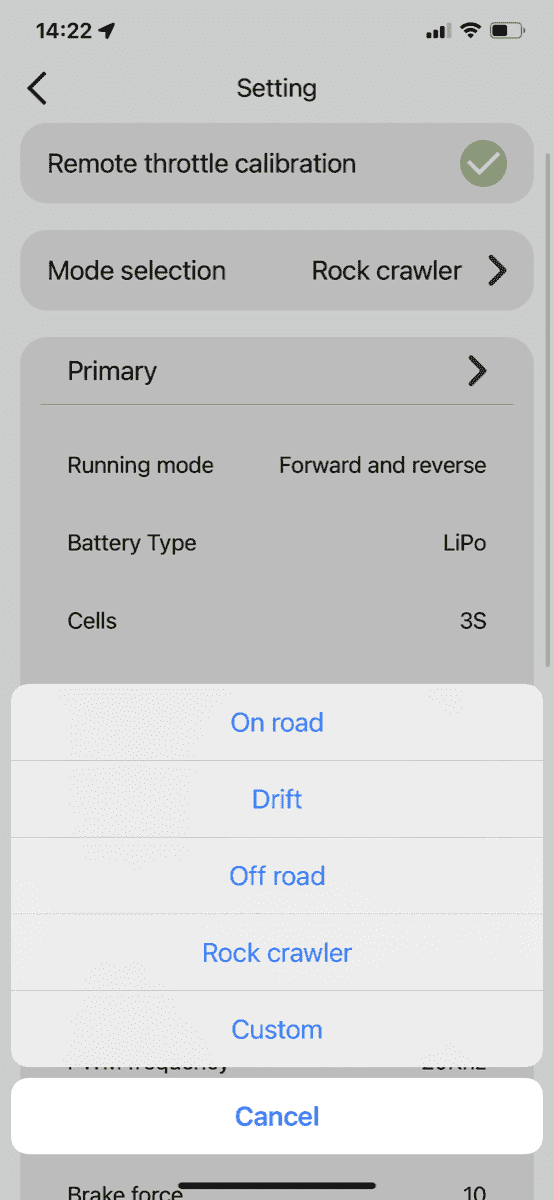
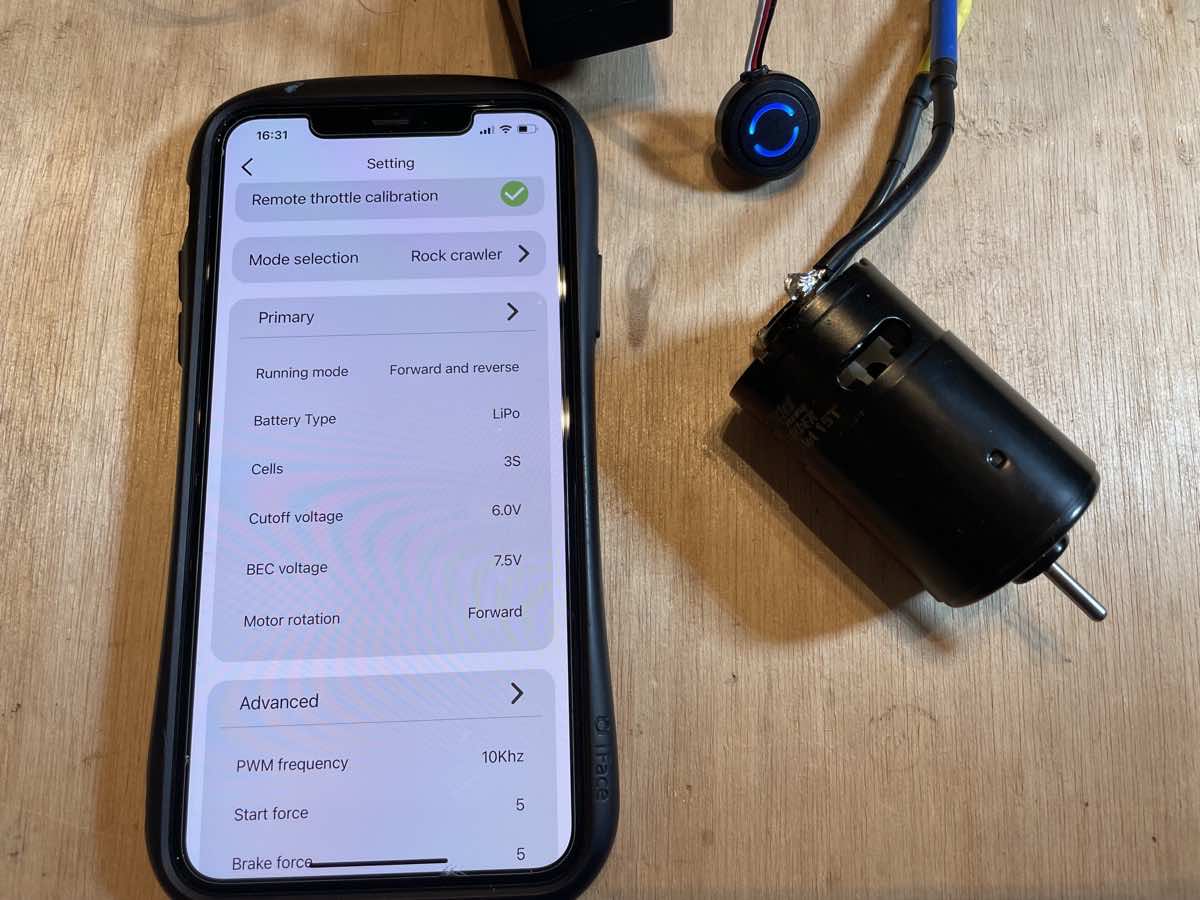
プリセット的な「モデルセレクション」でカテゴリーを選べます。
Rock Crawlerもちゃんとあります。
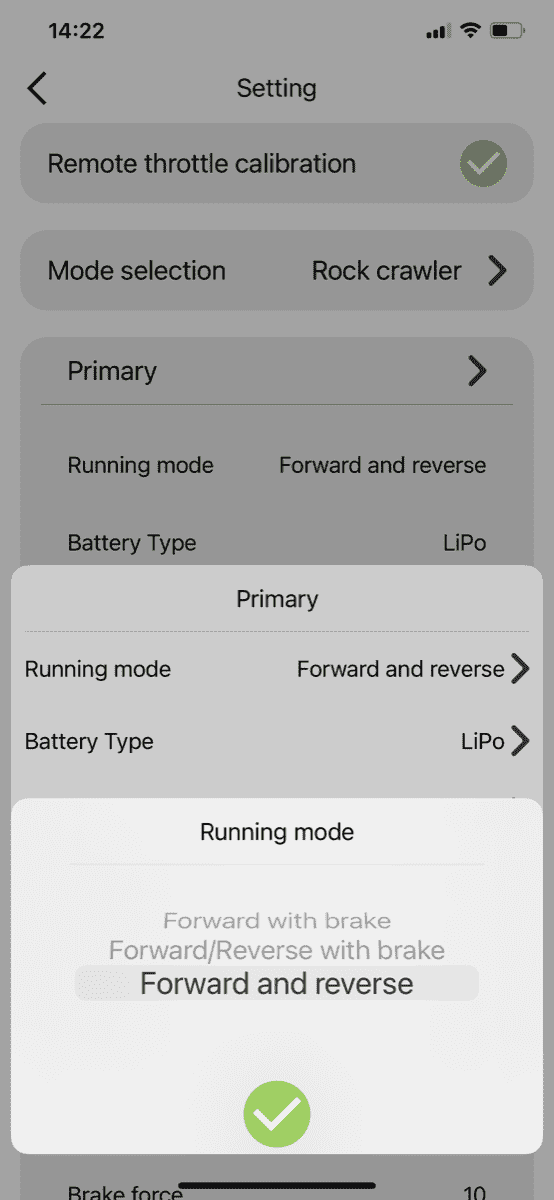
前進/後進ももちろん選択出来ます。
そのほか、BEC出力は6V-7.5CVまで0.1V刻みで変更可能。
バッテリーセル数、モーター方向なども基本設定で行います。
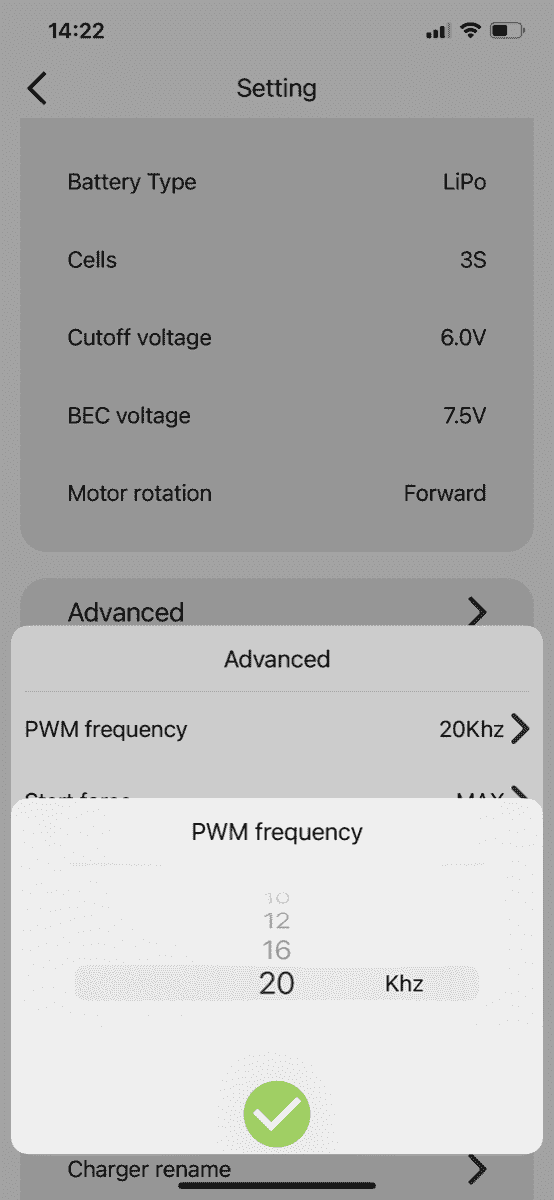
詳細設定では、PWM周波数を1-20kHzまで。
スタートフォース、ブレーキフォースは10段階で設定
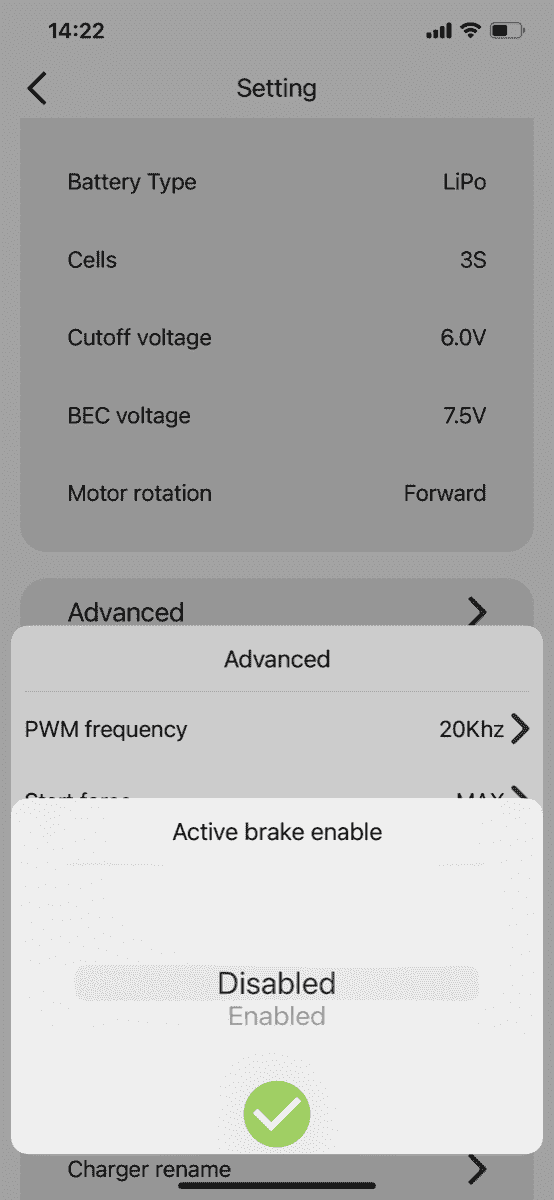
さらに
アクディブドラッグブレーキ
アクティブブレーキ
の設定もココで行います。
これは実際に走行させないと変化が分からないかな。
多分マシン重量によって適切な値が変わってくるんでしょうね。
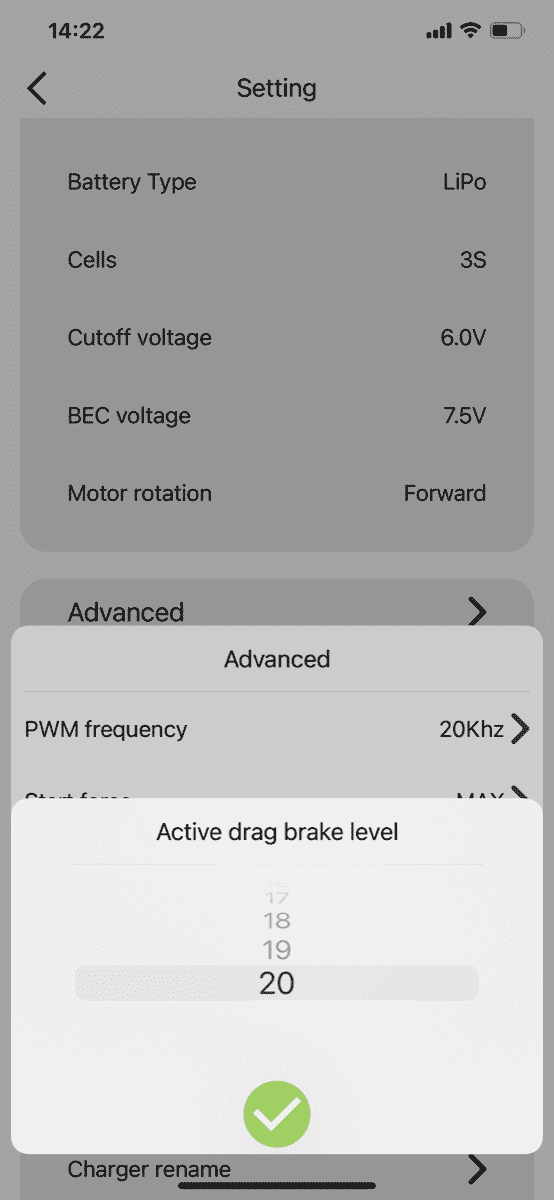
ACTIVE DRAG BRAKE LEVEL
「アクティブドラッグブレーキ」という名称になっていますが、簡単にはドラッグブレーキのことと思われます。
1080のドラッグブレーキとどんな差があるのが分かりませんが、HOBBYWING AXEやTEKINの高性能ドラッグブレーキと同等のモノなのかは分かりません。
ACTIVE BRAKE
この設定を有効にすると、より強いブレーキ力を生み出すことが出来るそうです。
ドラッグブレーキは、マシン重量によって100%設定でもマシンが落ちてきてしまうことがあるので、この設定をONにする事で改善出来るかもしれません。
Ramp Anti-Skid Lock
この項目は設定にはありません。
発動する条件は、
- フォワード/リバースモード時
- アクティブドラッグブレーキが0以外の設定値の時
どういうものかはイマイチ分かりませんが、下記に説明書から自動翻訳した文章をコピペしておきます。
ランプアンチスキッドロック:フォワード/リバースモード(クライミングモード)では、アクティブなドラッグブレーキレベルがゼロ以外の値に設定され、ランプアンチスキッドロック機能がオンになります。 この機能をオンにした後、スロットルまたはブレーキ位置から中間位置への移動を加速すると、モーターは現在の移動方向と反対のトルク力を生成して車両を静止状態に保ちます。この機能により、車両を停止させることができます。 平坦な道路を走行しているときはより速く、急な道路を走行しているときは車両を坂道にとどめることができます。 アクティブなドラッグブレーキレベルは、車両の重量と一致する必要があります。 レベルが高すぎると車両が安定せず、レベルが低すぎると車両が急な坂道にしっかりと留まることができなくなります。
現在の状態でモーターを回転させてニュートラルに戻すと、確かにモーターが逆回転に微量に小刻みに動いているのが分かります。これによってどんな坂道でも車輌を保持する事が出来る様になるのかな?と思います。
カーブ関係
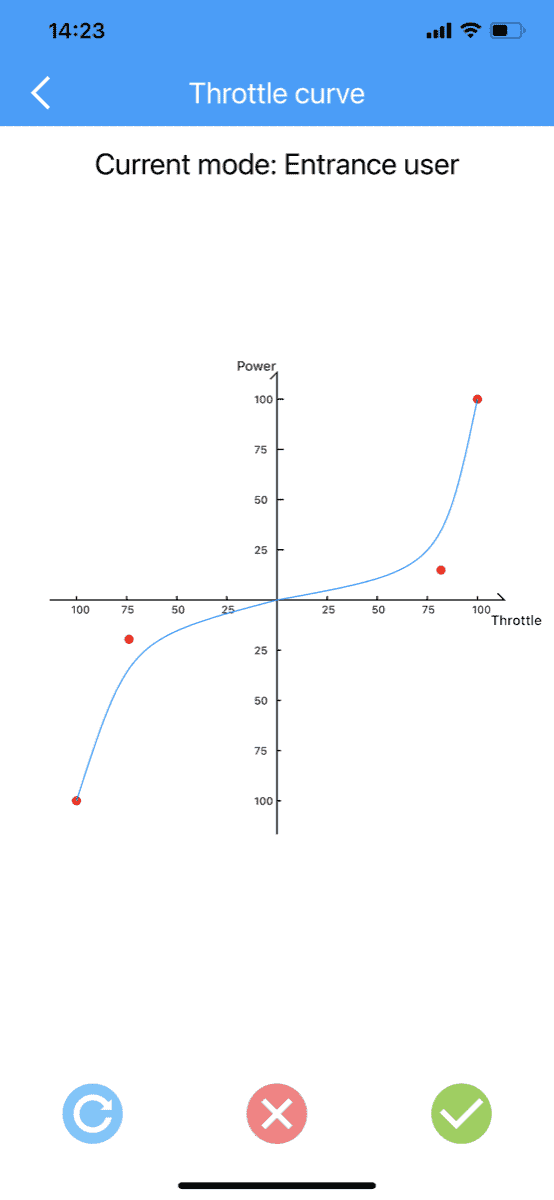
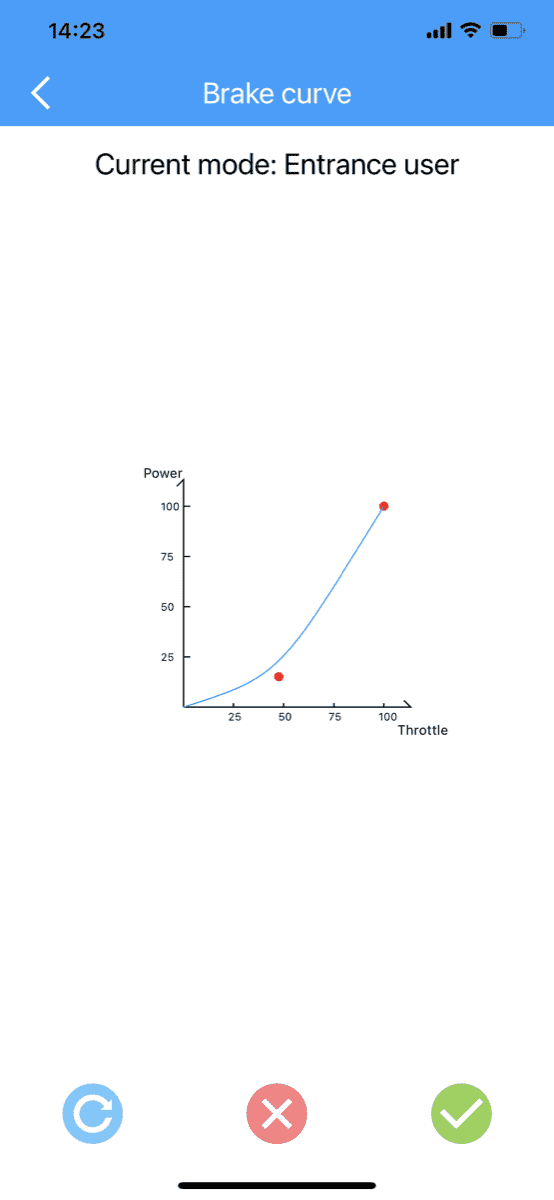
スロットルカーブ、ブレーキカーブも直感的に設定出来ます。
起動音の設定
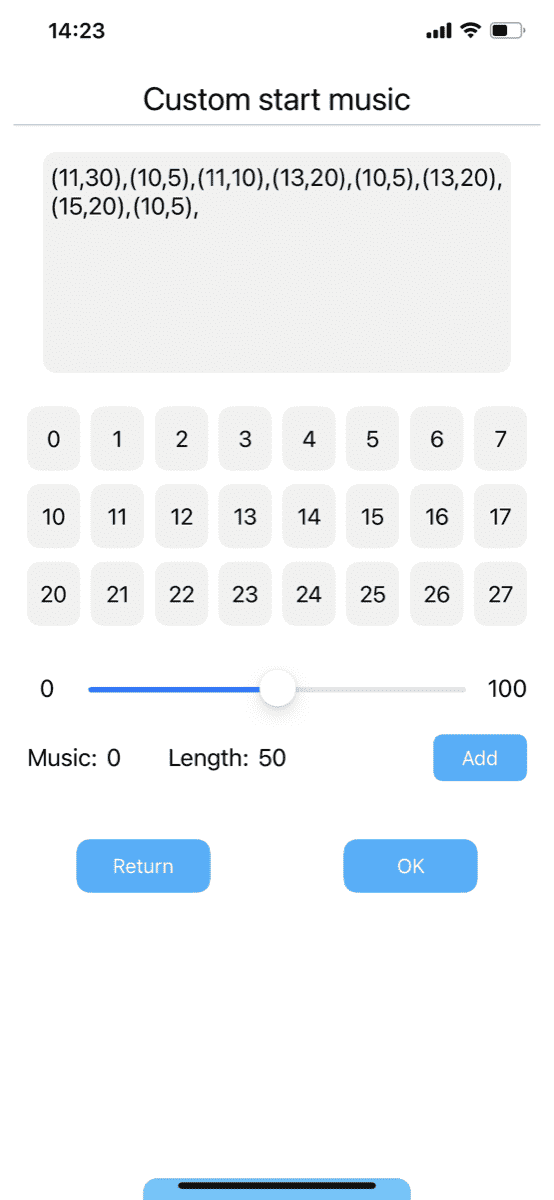
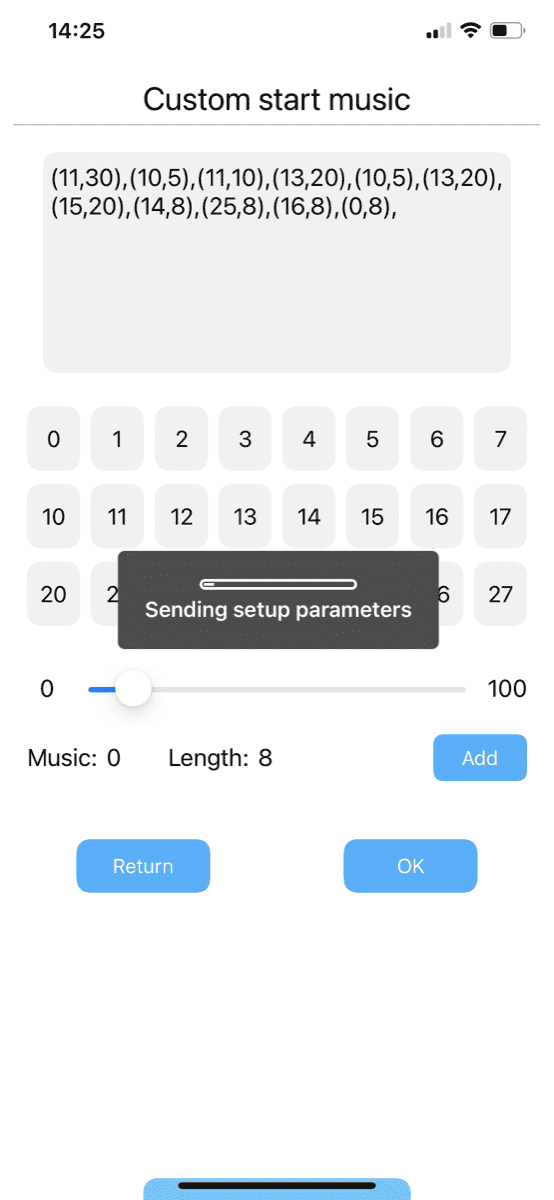
ほかのESCに無いのがコレ。
ESCに電源を入れた際に流れる起動音を自分で設定出来ます。
※ドローンのBLHELIなどではこの機能はあります。
詳しくは後日記事にしますが、設定は少々厄介です。
簡単にいうと、0-27までの数字に音程が割り当てられています。
0 = ラ
1 = ラ#
2 = シ
3 = ド
って感じで2オクターブほど。
で、下のスライダーで音の長さを設定します。
100 = 全音符
50 = 四分音符
25 = 八分音符
みたいな感じ。
実に面倒いです(笑)
しかも数字の18と19が抜けてます。。。
この辺はファームウェアのアップデートで改善されると思います。
ちょっとやってみましたが、音程がめちゃめちゃになりました。
あと、Bluetooth接続していて、設定をESCに送る際に、[TimeOut]になる事が度々あり不安定です。
これはアプリ側の問題だと思うので、今後に期待したいです。
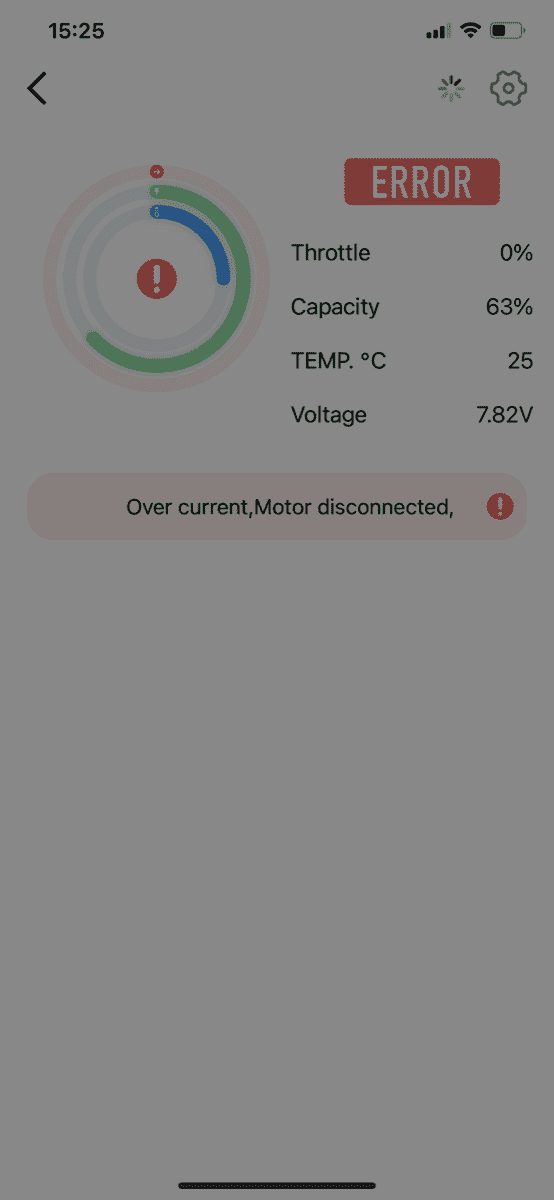
でも、なにかエラーがあるとこんな表示になります。
この辺は安心材料でもあります。

ということで、ESC70の設定を簡単にしてみたという話でした。
今後仕事が落ち着いたら車体にも取り付けて走行感も試して見ようと思います。
レビュー等も動画で撮影してみようと思うので、購入された方の参考になればと思います。

コメント